近日,由我校我院通信工程系在读博士生宰大卫与其导师组成员王程教授和程明教授等合作完成的论文“Pairwise registration of TLS point clouds using covariance descriptors and a non-cooperative game”,在遥感科学国际顶级学术刊物《ISPRS Journal of Photogrammetry and Remote Sensing》正式发表(vol. 134, pp. 15–29)。该期刊是成立于1910年的国际摄影测量与遥感学会(ISPRS)的会刊,由Elsevier出版发行,是遥感科学界影响因子( 6.387)最高、被列为中科院JCR一区的期刊。
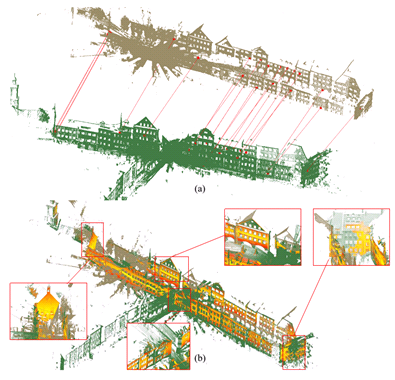
该论文提出了一种基于协方差描述子和博弈论的成对点云配准算法,用于解决由高性能激光扫描仪获取的高密度三维点云数据的配准问题。三维点云局部特征描述在三维目标识别与分类、点云语义分割、点云配准以及三维形状检索等应用中具有关键性作用,是目前三维计算机视觉领域一个新的研究热点。现有的点云局部特征描述主要采用几何信息构建描述向量,没有充分利用三维点云的所有信息量(包含几何、颜色、强度信息等),针对该问题,宰大为等提出了一种新的基于协方差矩阵的特征融合方法,通过充分利用三维点云的信息量来构建特征描述,并利用协方差矩阵的统计特性来描述特征之间线性共性关系进行特征融合。该成果在鲁棒性以及抗噪性等方面超过了当前点云特征描述技术发展的最高水平。另外,宰大卫等还提出了一个有效的基于博弈论的对应点对提取算法,通过分析全局的对应点对几何约束关系,快速剔除海量错误点对。该算法简单有效,显著地提高了当前三维点云配准的精度及鲁棒性。
该论文是王程教授带领的城市感知与计算创新团队的阶段性研究成果。前期成果已经由同一团队的2012级博士生于永涛(2015年毕业并获福建省优秀博士学位论文)和林阳斌(2016年毕业)发表在同一期刊上,分别是:“Bag-of-visual-phrases and hierarchical deep models for traffic sign detection and recognition in mobile laser scanning data (vol. 113, pp. 106–123, 2016)、“Line segment extraction for large scale unorganized point clouds(vol. 102, pp. 172–183, 2015)、“Using mobile laser scanning data for automated extraction of road markings”(vol. 87, pp. 93-107, 2014)。
博士生宰大卫,2012-2013年就读于我院计算机科学系,2014年起攻读信息与通信工程博士学位(硕博连读),目前已经在ISPRS Journal of Photogrammetry and Remote Sensing(JCR一区)、IEEE Transactions on Intelligent Transportation Systems(JCR二区)、IEEE Transactions on Geoscience and Remote Sensing(JCR二区)、IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing(JCR二区)发表论文 4篇。他的博士研究工作得到了国家自然科学基金面上项目(41471379、61471371、61602499)以及海西政务大数据应用协同创新中心和福建省智慧城市感知与计算重点实验室的支持。
全文链接:https://www.sciencedirect.com/science/article/pii/S0924271617303180
(信息科学与技术学院袁伟明、吴佳雯)